 |
| 1>>
Manipulator
and Robot |
|
| |
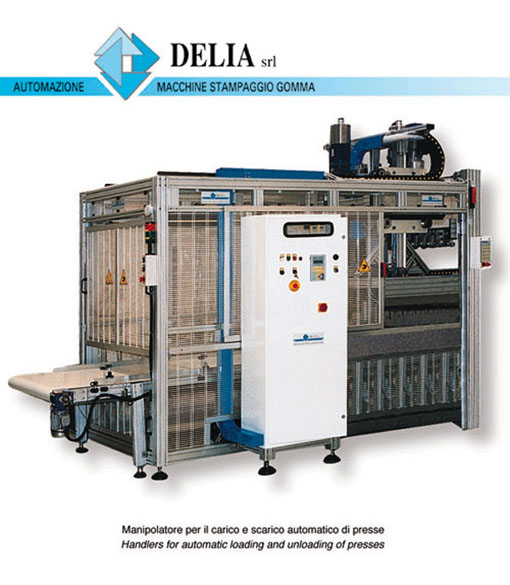
1.1
- TELESCOPIC MANIPULATOR
FOR THE AUTOMATIC EXTRACTION OF RUBBER MANUFACTURED ARTICLES |
| The
MANIPULATOR IS a machine for automatically loading and
unloading moulding presses. THE HANDLERS are stand alone
electric pneumatic and/or hydraulic units which are coupled
to vertical and horizontal injection compression presses
to remove moulded pieces and to load inserts. Because
they require very limited installation space, the standard
tools which are used to automate the insert loading operations,
to remove moulded items, to remove and separate flashes
from extracted items and to positions such articles in
a precise order, can be mounted easily on the compact
base of the handlers |
|
|
|
1.2
- MECHANICAL HAND FOR RUBBER PRESS AUTOMATIC LOADING AND
UNLOADING |
This
mechanical hand is a PLC-controlled Cartesian-axes machine
with both electrical and pneumatic movements.
It is used for loading and automatically extracting rubber
pieces pressed with vertical presses.
The mechanical hand draws raw rubber sheets leaning on
a belt placed in the front part of the press and places
them on the bottom die inside it. It draws pressed pieces
placed on the internal upper die and places them on a
conveyor belt for cooling and for evacuation outside the
structure.
The conveyor belt is in the front part of the press and
inside the mechanical hand. |
|
| |
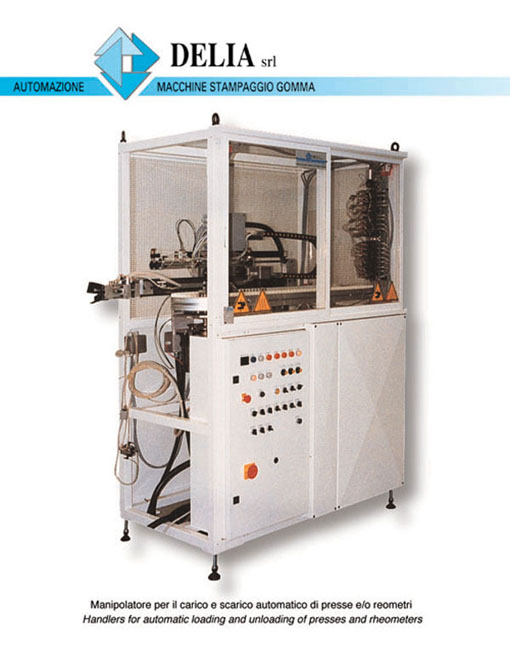
1.3
- HANDLERS FOR AUTOMATIC LOADING AND UNLOADING OF PRESSES
AND RHEOMETERS |
The
manipulator is used for loading raw pieces and automatically
extracting rubber pieces that have been pressed by means
of vertical compression presses. This PLC-controlled manipulator
with pneumatic movement is composed of a group for the
gripping-hand horizontal movement and a group for the
vertical movement. The vertical axis is rigidly constrained
to the basement, on which also the electrical control
panel and the pneumatic valves block are located.
|
|
| |
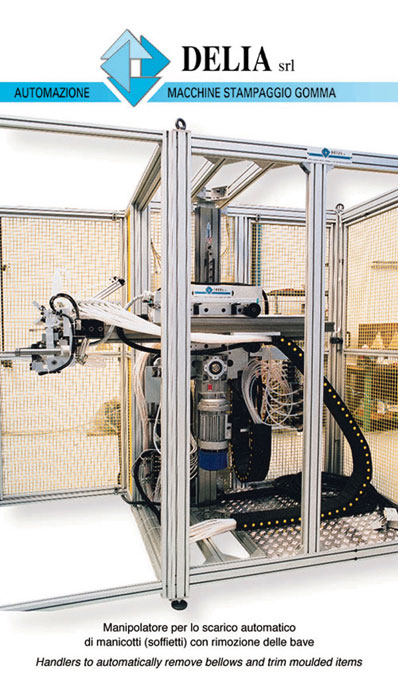
1.4
- MANIPULATOR FOR THE AUTOMATIC
EXTRACTION OF RUBBER BELLOWS (SLEEVES) |
| The
MANIPULATOR IS for automatically loading and unloading
moulding presses. THE HANDLERS are stand alone electric
pneumatic and/or hydraulic units which are coupled to
vertical and horizontal injection compression presses
to remove moulded pieces and to load inserts. Because
they require very limited installation space, the standard
tools which are used to automate the insert loading operations,
to remove moulded items, to remove and separate flashes
from extracted items and to positions such articles in
a precise order, can be mounted easily on the compact
base of the handlers. |
|
| |
1.5
- MANIPULATOR FOR THE INTERLOCKING
OF A PRESS FOR RUBBER WHEELS PRODUCTION |
| THE
HANDLERS are stand alone electric pneumatic and/or hydraulic
units which are coupled to vertical and horizontal injection
compression presses to remove moulded pieces and to load
inserts. Because they require very limited installation
space, the standard tools which are used to automate the
insert loading operations, to remove moulded items, to
remove and separate flashes from extracted items and to
positions such articles in a precise order, can be mounted
easily on the compact base of the handlers. |
|
| |
1.6
- MANIPULATOR FOR LOADING
METAL INSERTS (SCREWS) ONTO A 399 PIECES TRAY. |
| The
MANIPULATOR IS a machine for automatically loading and
unloading moulding presses. THE HANDLERS are stand alone
electric pneumatic and/or hydraulic units which are coupled
to vertical and horizontal injection compression presses
to remove moulded pieces and to load inserts. Because
they require very limited installation space, the standard
tools which are used to automate the insert loading operations,
to remove moulded items, to remove and separate flashes
from extracted items and to positions such articles in
a precise order, can be mounted easily on the compact
base of the handlers |
|
| |
1.7
- MANIPULATOR FOR AUTOMATICALLY EXTRACTING SMALL PRESSED
MATTER FEEDHEADS FOR RUBBER MANUFACTURED ARTICLES |
| The
MANIPULATOR is an electro-pneumatic unit to be used from
time to time with vertical and horizontal compression
and injection presses for removing feedheads or small
pressed matter for rubber manufactured articles. The MANIPULATOR
is composed of a basic, extremely solid structure, to
which different tools can be easily fitted - with minimum
overall dimensions -, which are normally used for extracting
feedheads or for automatizing inserts loading operations
and for extracting small pressed matter for rubber manufactured
articles. |
|
|
|