 |
| 2>>
Accessories
for manipulator and robot |
|
| |
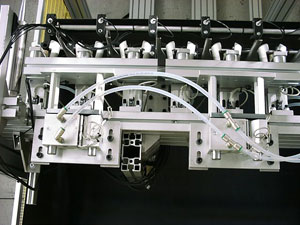
2.1
- HEADS WITH MULTIPLE MECHANICAL
GRIPPING HANDS FOR CARTESIAN ANTHROPOMORPHIC ROBOTS |
Heads
with multiple gripping hands are electro-pneumatic units
for removing rubber parts (sleeves and bellows) from the
males, on which they have been pressed. They can be fitted
to anthropomorphic robots or manipulators with Cartesian
axes.
Heads with multiple gripping hands can be of a MOBILE
or of a REMOVABLE FIXED TYPE.
|
|
|
|
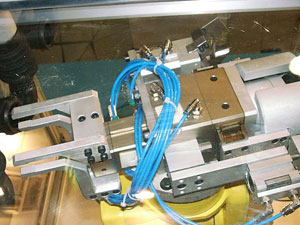
2.2
- MECHANICAL HANDS (PLIERS) FOR ANTHROPOMORPHIC AND CARTESIAN
ROBOTS |
Mechanical
hands (pliers) are pneumatic units for removing manufactured
articles (sleeves and bellows) made of rubber from the
males, on which they are pressed. Mechanical hands (pliers)
can be applied to anthropomorphic robots or manipulators
with Cartesian axes. They are composed of a basic, extremely
solid structure, on which different tools can be easily
fitted with minimum overall dimensions (mechanical fingers
or pliers), which are normally used for extracting pieces.
|
|
| |
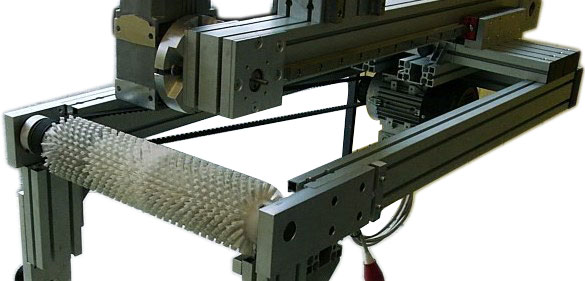
2.3
- BRUSH FOR RUBBER MANUFACTURED ARTICLES |
| The
BRUSH device is an electro-pneumatic unit to be used from
time to time with vertical and horizontal compression
and injection presses for removing feedheads or small
pressed matter for rubber manufactured articles. The BRUSH
is composed of a basic, extremely solid structure, to
which different tools can be easily fitted - with minimum
overall dimensions -, which are normally used for extracting
feedheads or for automatizing inserts loading operations
and for extracting small pressed matter for rubber manufactured
articles. |
|
| |
2.4
- MECHANICAL HANDS (PLIERS) FOR THE MANUAL EXTRACTION
OF RUBBER MANUFACTURED ARTICLES |
| Mechanical
hands (pliers) are pneumatic units for removing manufactured
articles (sleeves and bellows) made of rubber from the
males, on which they are pressed. Mechanical hands (pliers)
can be applied to anthropomorphic robots or manipulators
with Cartesian axes. They are composed of a basic, extremely
solid structure, on which different tools can be easily
fitted with minimum overall dimensions (mechanical fingers
or pliers), which are normally used for extracting pieces. |
|
|
|